|
FCL
0.6.0
Flexible Collision Library
|
|
FCL
0.6.0
Flexible Collision Library
|
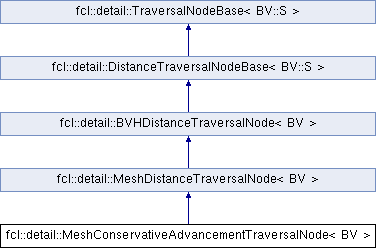
continuous collision node using conservative advancement. when using this default version, must refit the BVH in current configuration (R_t, T_t) into default configuration More...
#include <mesh_conservative_advancement_traversal_node.h>
Public Types | |
| using | S = typename BV::S |
 Public Types inherited from fcl::detail::MeshDistanceTraversalNode< BV > Public Types inherited from fcl::detail::MeshDistanceTraversalNode< BV > | |
| using | S = typename BV::S |
| Public Types inherited from fcl::detail::BVHDistanceTraversalNode< BV > | |
| using | S = typename BV::S |
Public Member Functions | |
| MeshConservativeAdvancementTraversalNode (S w_=1) | |
| S | BVTesting (int b1, int b2) const |
| BV culling test in one BVTT node. | |
| void | leafTesting (int b1, int b2) const |
| Conservative advancement testing between leaves (two triangles) | |
| bool | canStop (S c) const |
| Whether the traversal process can stop early. | |
| Public Member Functions inherited from fcl::detail::MeshDistanceTraversalNode< BV > | |
| void | leafTesting (int b1, int b2) const |
| Distance testing between leaves (two triangles) | |
| bool | canStop (S c) const |
| Whether the traversal process can stop early. | |
| Public Member Functions inherited from fcl::detail::BVHDistanceTraversalNode< BV > | |
| bool | isFirstNodeLeaf (int b) const |
| Whether the BV node in the first BVH tree is leaf. | |
| bool | isSecondNodeLeaf (int b) const |
| Whether the BV node in the second BVH tree is leaf. | |
| bool | firstOverSecond (int b1, int b2) const |
| Determine the traversal order, is the first BVTT subtree better. | |
| int | getFirstLeftChild (int b) const |
| Obtain the left child of BV node in the first BVH. | |
| int | getFirstRightChild (int b) const |
| Obtain the right child of BV node in the first BVH. | |
| int | getSecondLeftChild (int b) const |
| Obtain the left child of BV node in the second BVH. | |
| int | getSecondRightChild (int b) const |
| Obtain the right child of BV node in the second BVH. | |
| Public Member Functions inherited from fcl::detail::DistanceTraversalNodeBase< BV::S > | |
| virtual bool | canStop (BV::Sc) const |
| Check whether the traversal can stop. | |
| void | enableStatistics (bool enable) |
| Whether store some statistics information during traversal. | |
| Public Member Functions inherited from fcl::detail::TraversalNodeBase< BV::S > | |
| virtual void | preprocess () |
| virtual void | postprocess () |
Public Attributes | |
| S | min_distance |
| Vector3< S > | closest_p1 |
| Vector3< S > | closest_p2 |
| int | last_tri_id1 |
| int | last_tri_id2 |
| S | w |
| CA controlling variable: early stop for the early iterations of CA. | |
| S | toc |
| The time from beginning point. | |
| S | t_err |
| S | delta_t |
| The delta_t each step. | |
| const MotionBase< S > * | motion1 |
| Motions for the two objects in query. | |
| const MotionBase< S > * | motion2 |
| std::vector< ConservativeAdvancementStackData< S > > | stack |
| Public Attributes inherited from fcl::detail::MeshDistanceTraversalNode< BV > | |
| Vector3< S > * | vertices1 |
| Vector3< S > * | vertices2 |
| Triangle * | tri_indices1 |
| Triangle * | tri_indices2 |
| S | rel_err |
| relative and absolute error, default value is 0.01 for both terms | |
| S | abs_err |
| Public Attributes inherited from fcl::detail::BVHDistanceTraversalNode< BV > | |
| const BVHModel< BV > * | model1 |
| The first BVH model. | |
| const BVHModel< BV > * | model2 |
| The second BVH model. | |
| int | num_bv_tests |
| statistical information | |
| int | num_leaf_tests |
| S | query_time_seconds |
| Public Attributes inherited from fcl::detail::DistanceTraversalNodeBase< BV::S > | |
| DistanceRequest< BV::S > | request |
| request setting for distance | |
| DistanceResult< BV::S > * | result |
| distance result kept during the traversal iteration | |
| bool | enable_statistics |
| Whether stores statistics. | |
| Public Attributes inherited from fcl::detail::TraversalNodeBase< BV::S > | |
| Transform3< BV::S > | tf1 |
| configuation of first object | |
| Transform3< BV::S > | tf2 |
| configuration of second object | |
Friends | |
| template<typename , typename > | |
| struct | CanStopImpl |
continuous collision node using conservative advancement. when using this default version, must refit the BVH in current configuration (R_t, T_t) into default configuration
 1.8.11
1.8.11 
